Java并发 -- CSP模型
Go
- Go是一门号称从语言层面支持并发的编程语言,支持并发也是Go非常重要的特性之一
- Go支持协程,协程可以类比Java中的线程,解决并发问题的难点在于线程(协程)之间的协作
- Go提供了两种方案
- 支持协程之间以共享内存的方式通信,Go提供了管程和原子类来对协程进行同步控制,该方案与Java类似
- 支持协程之间以消息传递的方式通信,本质上是要避免共享,该方案是基于CSP模型实现的,Go推荐该方案
CSP模型
- CSP:Communicating Sequential Processes
- Do not communicate by sharing memory; instead, share memory by communicating.
累加器
1 | package main |
生产者-消费者模式
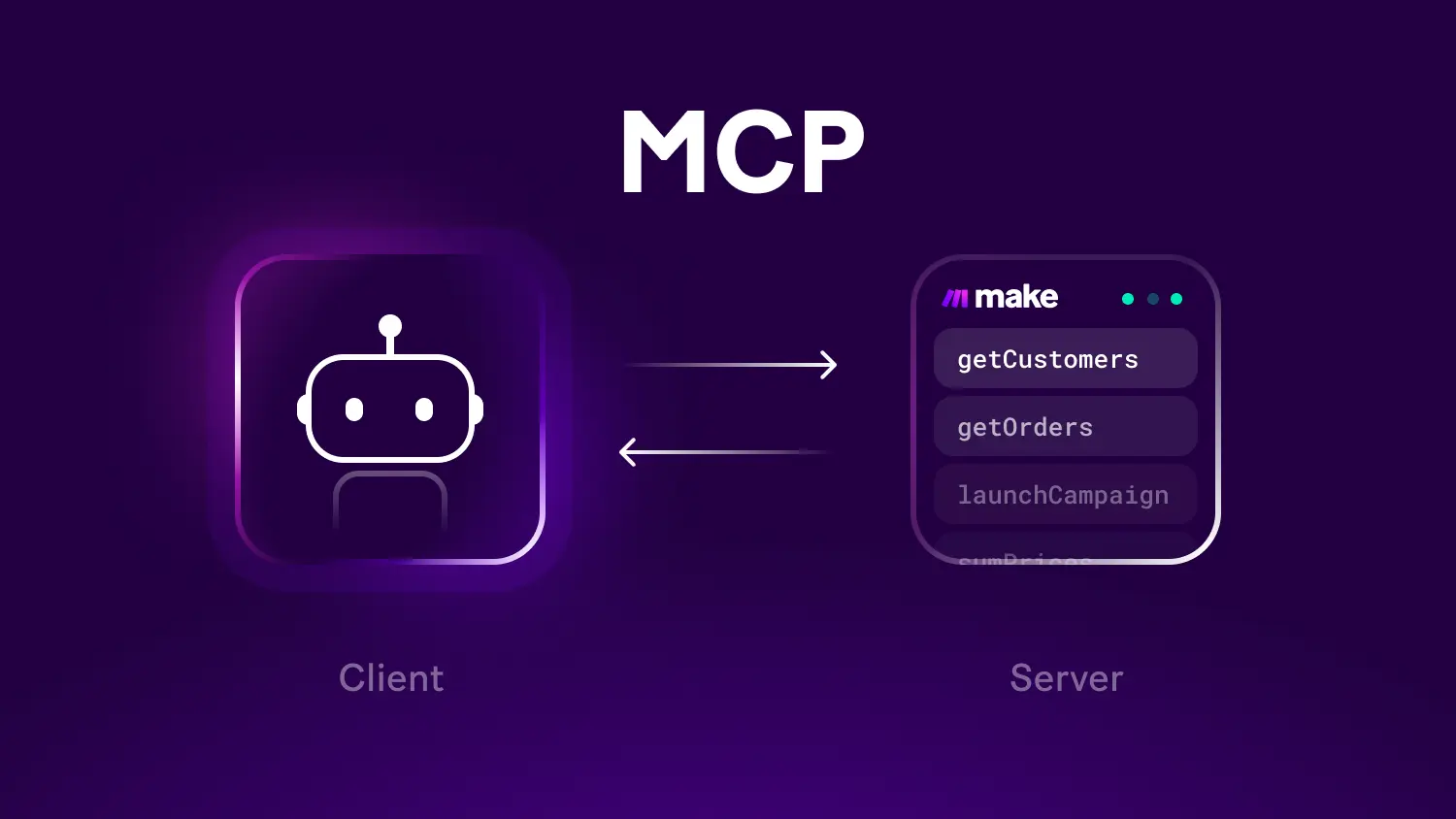
- 可以把Go实现的CSP模式类比成生产者-消费者模式,而channel类比成生产者-消费者模式中的阻塞队列
- Go中channel的容量可以为0,容量为0的channel被称为无缓冲的channel,容量大于0的channel被称为有缓冲的channel
- 无缓冲的channel类似于Java中提供的SynchronousQueue,主要用途是在两个协程之间做数据交换
- Go中的channel是语言层面支持的,使用左向箭头
<-完成向channel发送数据和读取数据的任务 - Go中的channel是支持双向传输的,即一个协程既可以通过它发送数据,也可以通过它接收数据
- Go中的双向channel可以变成一个单向channel
- calc中创建了一个双向channel,但是返回的是一个只能接收数据的单向channel
- 所以在主协程中,只能通过该channel接收数据,而不能通过它发送数据
1 | // 创建一个容量为4的channel |
Actor模式
- Go实现的CSP模式和Actor模式都是通过消息传递的方式来避免共享,主要有以下三个区别
- Actor模型中没有channel,Actor模型中的Mailbox与channel非常类似,看起来都是FIFO队列,但本质区别很大
- Actor模型
- Mailbox对程序员是透明的,Mailbox明确归属于某一个特定的Actor,是Actor模型的内部机制
- Actor之间可以直接通信,不需要通信媒介
- CSP模型
- channel对于程序员来说是可见的
- channel是通信媒介,传递的消息都直接发送到channel中
- Actor模型
- Actor模型中发送消息是非阻塞的,而CSP模型中是阻塞的
- Go实现的CSP模型,channel是一个阻塞队列
- 当阻塞队列已满的时候,向channel发送数据,会导致发送消息的协程阻塞
- Actor模型理论上不保证消息百分比送达,而Go实现的CSP模型中,是能保证消息百分百送达的(代价:可能导致死锁)
1 | func main() { |
小结
- CSP模型是Tony Hoare在1978年提出的,该模型一直都在发展,其理论远比Go实现的复杂得多
- Tony Hoare在并发领域还有另一项重要成就,即霍尔管程模型,这是Java解决并发问题的理论基础
- Java可以借助第三方类库JCSP来支持CSP模型,相比Go的实现,JCSP更接近理论模型
- JCSP并没有经过广泛的生产环境检验,因此不推荐在生产环境使用
参考资料
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.
Related Articles
2019-05-16
Java并发 -- CompletionService
场景1234567// 从3个电商询价,保存到数据库,串行执行,性能很慢int p1 = getPriceByS1();save(p1);int p2 = getPriceByS2();save(p2);int p3 = getPriceByS3();save(p3); ThreadPoolExecutor + Future1234567891011ExecutorService pool = Executors.newFixedThreadPool(3);Future<Integer> f1 = pool.submit(() -> getPriceByS1());Future<Integer> f2 = pool.submit(() -> getPriceByS2());Future<Integer> f3 = pool.submit(() -> getPriceByS3());int p1 = f1.get(); // 阻塞,如果f2.get()很快,但f1.get()很慢,依旧需要等待pool.execute(() -> save(...

2019-04-29
Java并发 -- 线程数量
多线程的目的 使用多线程的目的是为了_提高程序性能_ 度量程序性能的核心指标:_延迟 + 吞吐量_ 延迟:发出请求到收到响应的时间,延迟越短,意味着程序执行得越快,性能越好 吞吐量:在单位时间内能处理请求的数量,吞吐量越大,意味着程序能处理的请求越多,性能越好 同等条件下,延迟越短,吞吐量越大,但两者隶属于不同的维度(一个时间维度,一个空间维度),并不能互相转换 提升程序性能:_降低延迟,提高吞吐量_ 多线程的应用场景 要达到降低延迟,提高吞吐量的目的,有两个方向:一个是优化算法,一个是_将硬件的性能发挥到极致_ 前者属于算法范畴,后者与并发编程息息相关 在并发编程领域,_提高性能本质上就是要提高硬件的利用率_,主要是提升IO利用率和CPU利用率 操作系统解决硬件利用率问题的对象往往是单一的硬件设备,而并发编程要解决CPU和IO设备综合利用率的问题 综合利用率假设程序按照CPU计算和IO操作交叉执行的方式运行,而且CPU计算和IO操作的耗时是1:1 单线程 单线程时,执行CPU计算的时候,IO设备空闲,执行IO操作时,CPU空闲,所以CPU利用率和IO设备的利用率都是50% 两线程...

2019-05-01
Java并发 -- 面向对象
封装共享变量 面向对象思想里面有一个很重要的特性:_封装_ 封装:将属性和实现细节封装在对象内部,外部对象只能通过目标对象的公共方法来间接访问目标对象的内部属性 利用面向对象思想写并发程序的思路:将共享变量作为对象属性封装在内部,对所有公共方法制定_并发访问策略_ Countervalue为共享变量,作为Counter的实例属性,将get()和addOne()声明为synchronized方法,Counter就是一个线程安全的类 1234567891011public class Counter { private long value; public synchronized long get() { return value; } public synchronized long addOne() { return ++value; }} 不可变的共享变量 实际场景中,会有很多共享变量,如银行账户有卡号、姓名、身份证、信用额度等,其中卡号、姓名和身份证是不会变的 对于不可变的...

2019-05-18
Java并发 -- Immutability模式
Immutability模式Immutability模式:对象一旦被创建之后,状态就不再发生变化 不可变类 将一个类所有的属性都设置成final,并且只允许存在只读方法 将类也设置成final的,因为子类可以重写父类的方法,有可能改变不可变性 包装类 String、Integer、Long和Double等基础类型的包装类都具备不可变性 这些对象的线程安全都是靠不可变性来保证的 严格遵守:_类和属性都是final的,所有方法均是只读的_ 如果具备不可变性的类,需要提供修改的功能,那会创建一个新的不可变对象 这会浪费内存空间,可以通过享元模式来优化 1234567891011121314151617181920212223242526272829private final char value[];public String replace(char oldChar, char newChar) { if (oldChar != newChar) { int len = value.length; int i = -1; cha...

2019-05-15
Java并发 -- CompletableFuture
泡茶烧水 123456789101112131415161718192021222324CompletableFuture<Void> f1 = CompletableFuture.runAsync(() -> { System.out.println("T1: 洗水壶"); sleep(1, TimeUnit.SECONDS); System.out.println("T1: 烧开水"); sleep(15, TimeUnit.SECONDS);});CompletableFuture<String> f2 = CompletableFuture.supplyAsync(() -> { System.out.println("T2: 洗茶壶"); sleep(1, TimeUnit.SECONDS); System.out.println("T2: 洗茶杯"); sleep(2, TimeUnit.SE...
2019-05-11
Java并发 -- CountDownLatch + CyclicBarrier
对账系统 1234567891011// 存在未对账订单while (existUnreconciledOrders()) { // 查询未对账订单 pOrder = getPOrder(); // 查询派送订单 dOrder = getDOrder(); // 执行对账操作 Order diff = check(pOrder, dOrder); // 将差异写入差异库 save(diff);} 性能瓶颈 getPOrder()和getDOrder()最为耗时,并且两个操作没有先后顺序的依赖,可以并行处理 简单并行 - join 123456789101112131415161718192021222324// 存在未对账订单// 存在未对账订单while (existUnreconciledOrders()) { // 查询未对账订单 Thread t1 = new Thread(() -> { pOrder = getPOrder(); }); ...