计算机组成 -- 冒险
冒险
- 流水线架构的CPU,是主动进行的冒险选择,期望通过冒险带来更高的回报
- 对于各种冒险可能造成的问题,都准备好了应对方案
- 分类
- 结构冒险(Structural Hazard)
- 数据冒险(Data Hazard)
- 控制冒险(Control Hazard)
结构冒险
- 结构冒险,本质上是一个硬件层面的资源竞争问题
- CPU在同一个时钟周期,同时在运行两条计算机指令的不同阶段,但这两个不同的阶段可能会用到同样的硬件电路
内存的数据访问
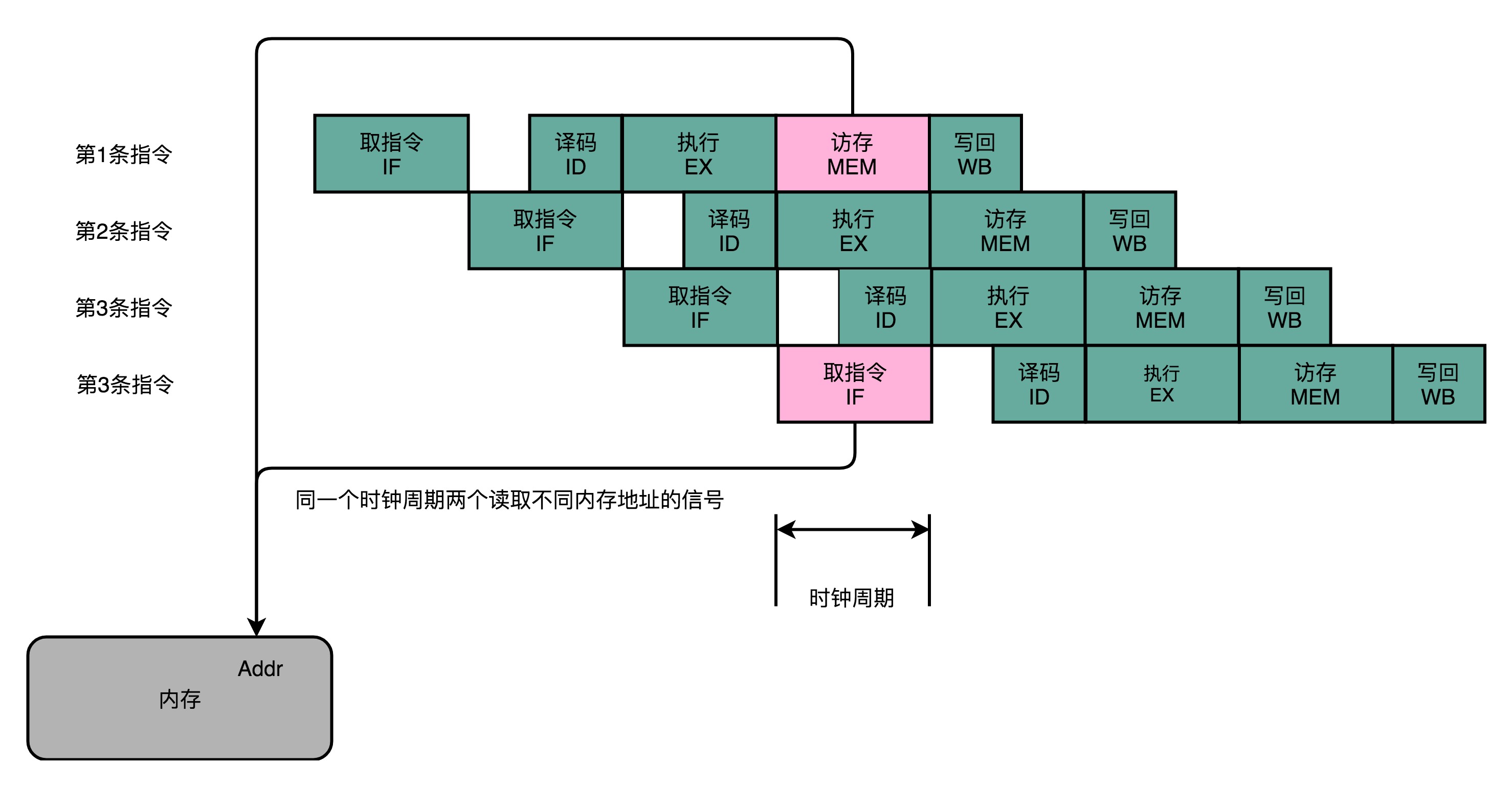
- 第1条指令执行到访存(MEM)阶段的时候,流水线的第4条指令,在执行取指令(Fetch)操作
- 访存和取指令,都是要进行内存数据的读取,而内存只有一个地址译码器,只能在一个时钟周期内读取一条数据
- 无法同时执行第1条指令的读取内存数据和第4条指令的读取指令代码
解决方案
- 解决方案:增加资源
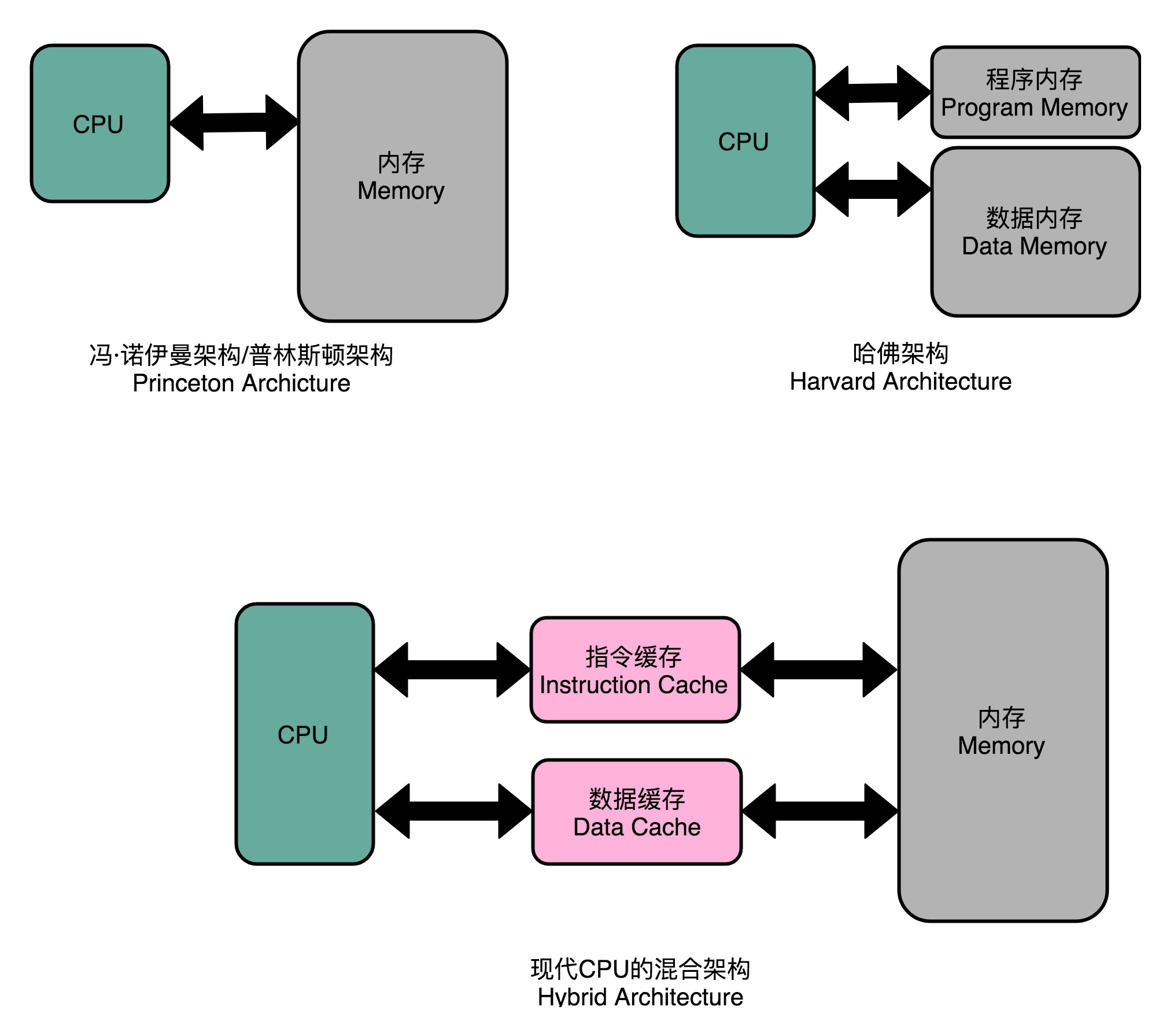
- 哈佛架构
- 把内存分成两部分,它们有各自的地址译码器,这两部分分别是存放指令的程序内存和存放数据的数据内存
- 缺点:无法根据实际情况去动态调整
- 普林斯顿架构 – 冯.诺依曼体系架构
- 今天使用的CPU,仍然是冯.诺依曼体系架构,并没有把内存拆成程序内存和数据内存两部分
- 混合架构
- 现代CPU没有在内存层面进行对应的拆分,但在CPU内部的高速缓存部分进行了区分,分成了指令缓存和数据缓存
- 内存的访问速度远比CPU的速度慢,现代CPU并不会直接读取主内存
- 会从主内存把指令和数据加载到高速缓存中,后续的访问都是访问高速缓存
- 指令缓存和数据缓存的拆分,使得CPU在进行数据访问和取指令的时候,不会再发生资源冲突的情况
数据冒险
- 结构冒险是硬件层面的问题,可以通过增加硬件资源的方式来解决;但还有很多冒险问题属于程序逻辑层面,最常见是数据冒险
- 数据冒险:同时在执行多个指令之间,有数据依赖的情况
- 依赖分类
- 先写后读(Read After Write,RAW)
- 先读后写(Write After Read,WAR)
- 写后再写(Write After Write,WAW)
依赖
写 -> 读
1 | int main() { |
1 | $ gcc -g -c raw.c |
1 | ...... |
- 内存地址12的机器码,把0x2添加到
rbp-0x4对应的内存地址 - 内存地址16的机器码,从
rbp-0x4这个内存地址里面读取,把值把写入到eax这个寄存器里面 - 必须保证:在内存地址16的指令读取
rbp-0x4里面的值之前,内存地址12的指令写入到rbp-0x4的操作已经完成 - 写 -> 读的依赖关系,一般称为数据依赖,即Data Dependency
- 简单理解:先写入,才能读
读 -> 写
1 | int main() { |
1 | $ gcc -g -c war.c |
1 | ...... |
- 内存地址15的指令,要把
eax寄存器里面的值读出来,再加到rbp-0x4的内存地址 - 内存地址18的指令,要更新
eax寄存器 - 如果内存地址18的
eax的写入先完成,在内存地址为15的代码里面取出eax才发生,程序就会出错
- 同样要保证对于
eax的先读后写的操作顺序
- 读 -> 写的依赖关系,一般称为反依赖,即Anti Dependency
- 简单理解:前一个读操作取出来的数据用于其它运算,后一个写操作就不能先执行完成
写 -> 写
1 | int main() { |
1 | $ gcc -g -c waw.c |
1 | ...... |
- 内存地址4的指令和内存地址b的指令,都是将对应的数据写入到
rbp-0x4的内存地址里面 - 必须保证:内存地址4的指令的写入,在内存地址b的指令的写入之前完成
- 写 -> 写的依赖关系,一般称为输出依赖,即Output Dependency
- 简单理解:覆盖写
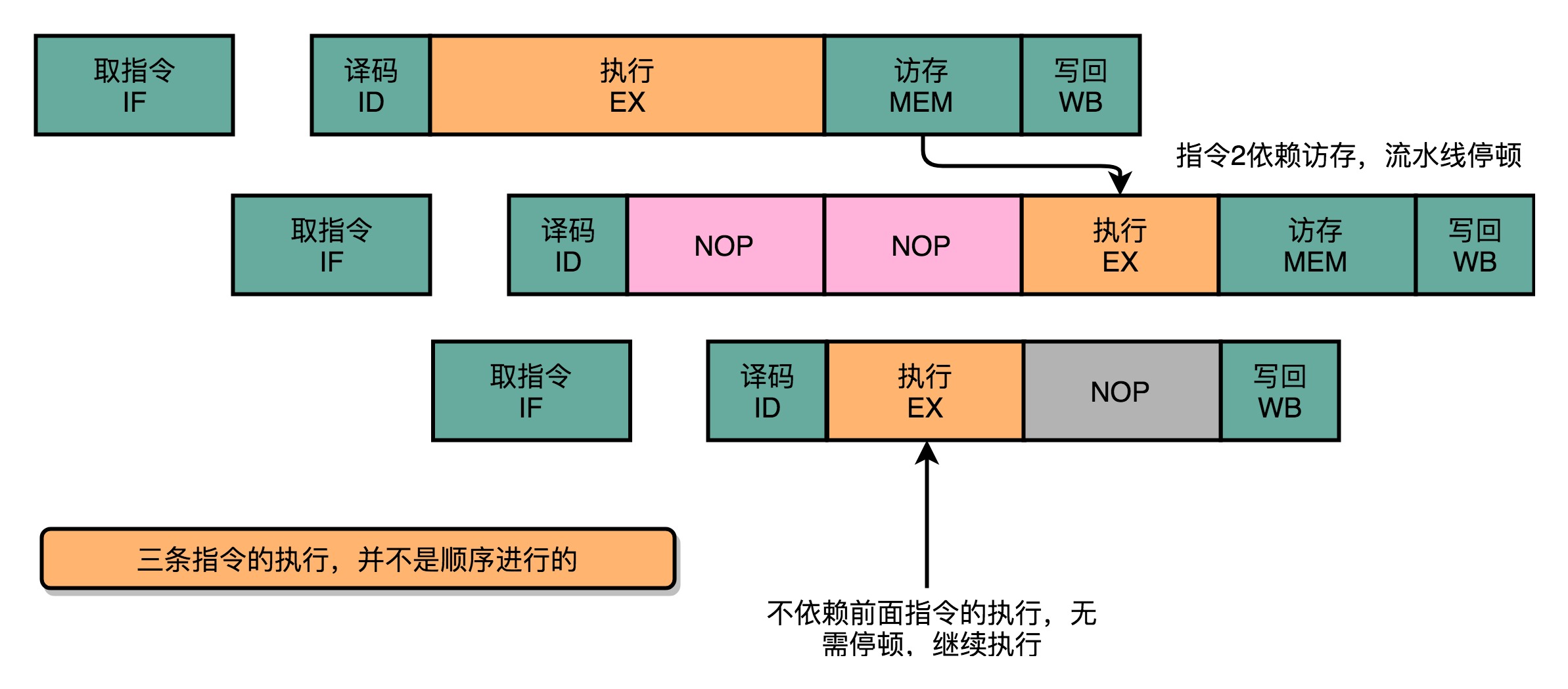
解决方案 – 流水线停顿
- 除了读 -> 读,对于同一个寄存器或者内存地址的操作,都有明确强制的顺序要求
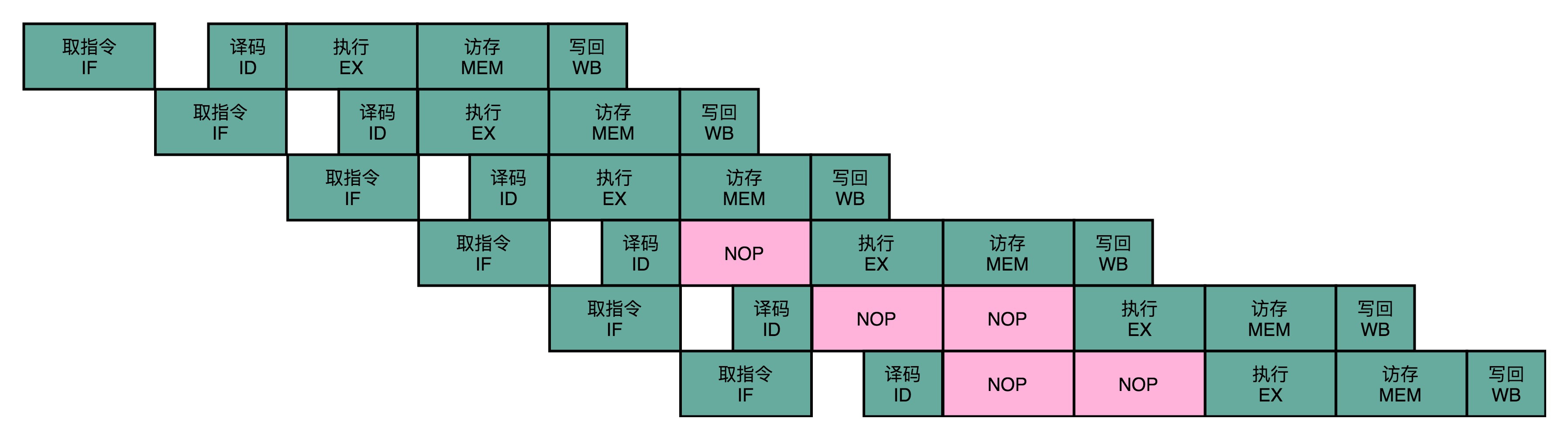
- 解决数据冒险的简单方案:流水线停顿(Pipeline Stall)、别称:流水线冒泡(Pipeline Bubbling)
- 这是一种以牺牲CPU性能为代价的方案,在最坏的情况下,流水线架构的CPU会退化成单指令周期的CPU!!
- 在进行指令译码的时候,会拿到对应指令所需要访问的寄存器和内存地址
- 此时能判断这个指令是否会触发数据冒险,如果会触发数据冒险,可以决定让整个流水线停顿一个或多个周期
- 时钟信号会不停地在0和1之间自动切换,并没有办法真的停顿下来
- 在实践过程中,并不是让流水线停下来,而是在执行后面的操作步骤前插入一个NOP(No Option)操作
- 好像在一个水管里面,进了一个空气泡,因此也叫流水线冒泡
操作数前推
流水线对齐
五级流水线
取指令(IF) -> 指令译码(ID) -> 指令执行(EX) -> 内存访问(MEM) -> 数据写回(WB)
MIPS指令

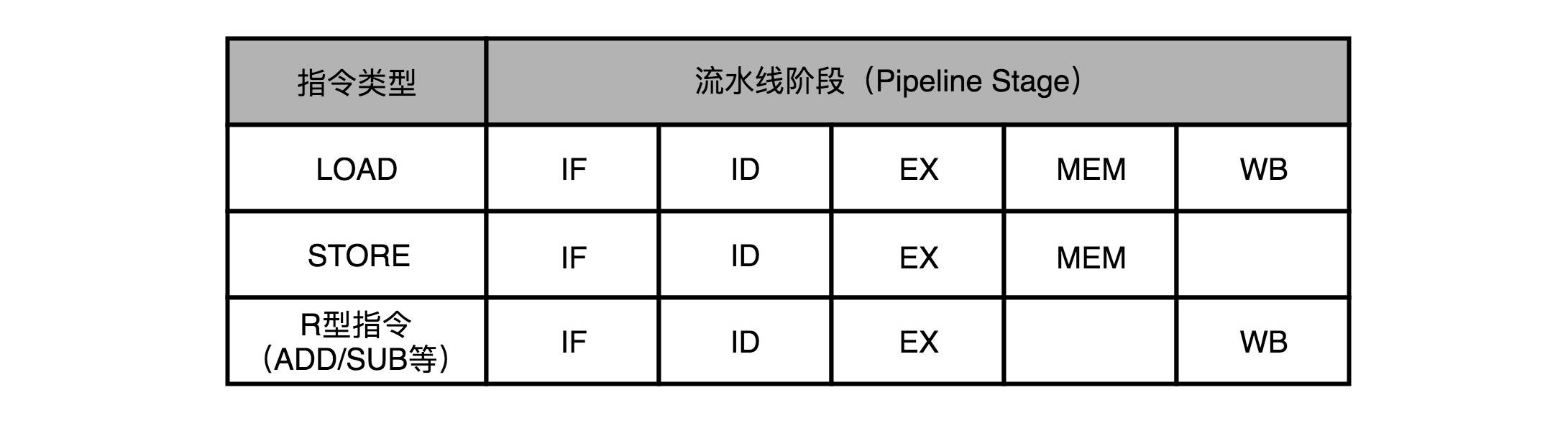
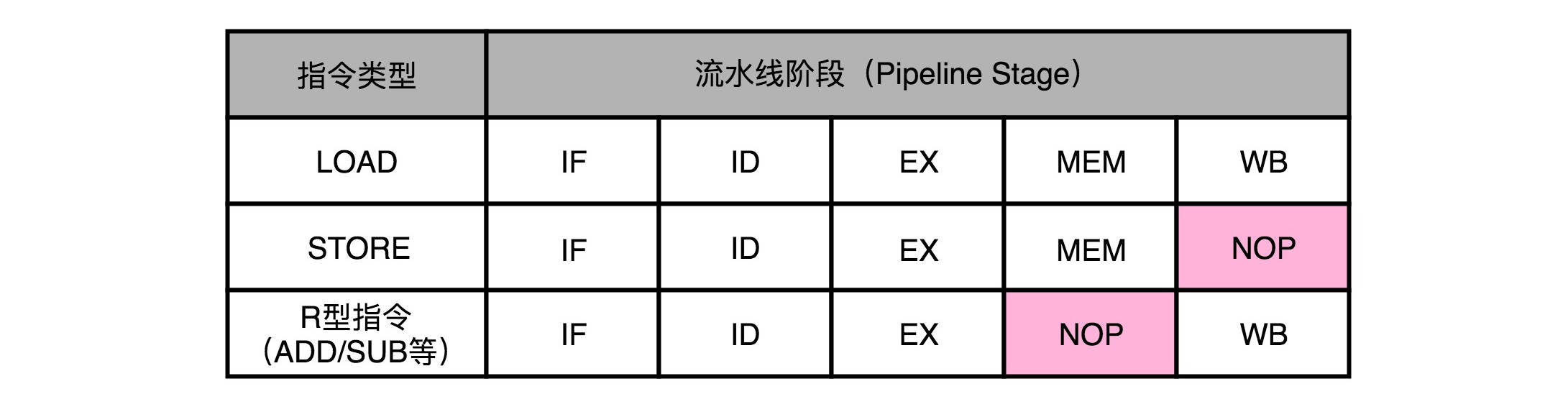
- 在MIPS的体系结构下,不同类型的指令,会在流水线的不同阶段进行不同的操作
- LOAD:从内存里读取数据到寄存器
- 需要经历5个完整的流水线
- STORE:从寄存器往内存里写入数据
- 不需要有写回寄存器的操作,即没有数据写回(WB)的流水线阶段
- ADD、SUB
- 加减法指令,所有操作都在寄存器完成,没有实际的内存访问(MEM)操作
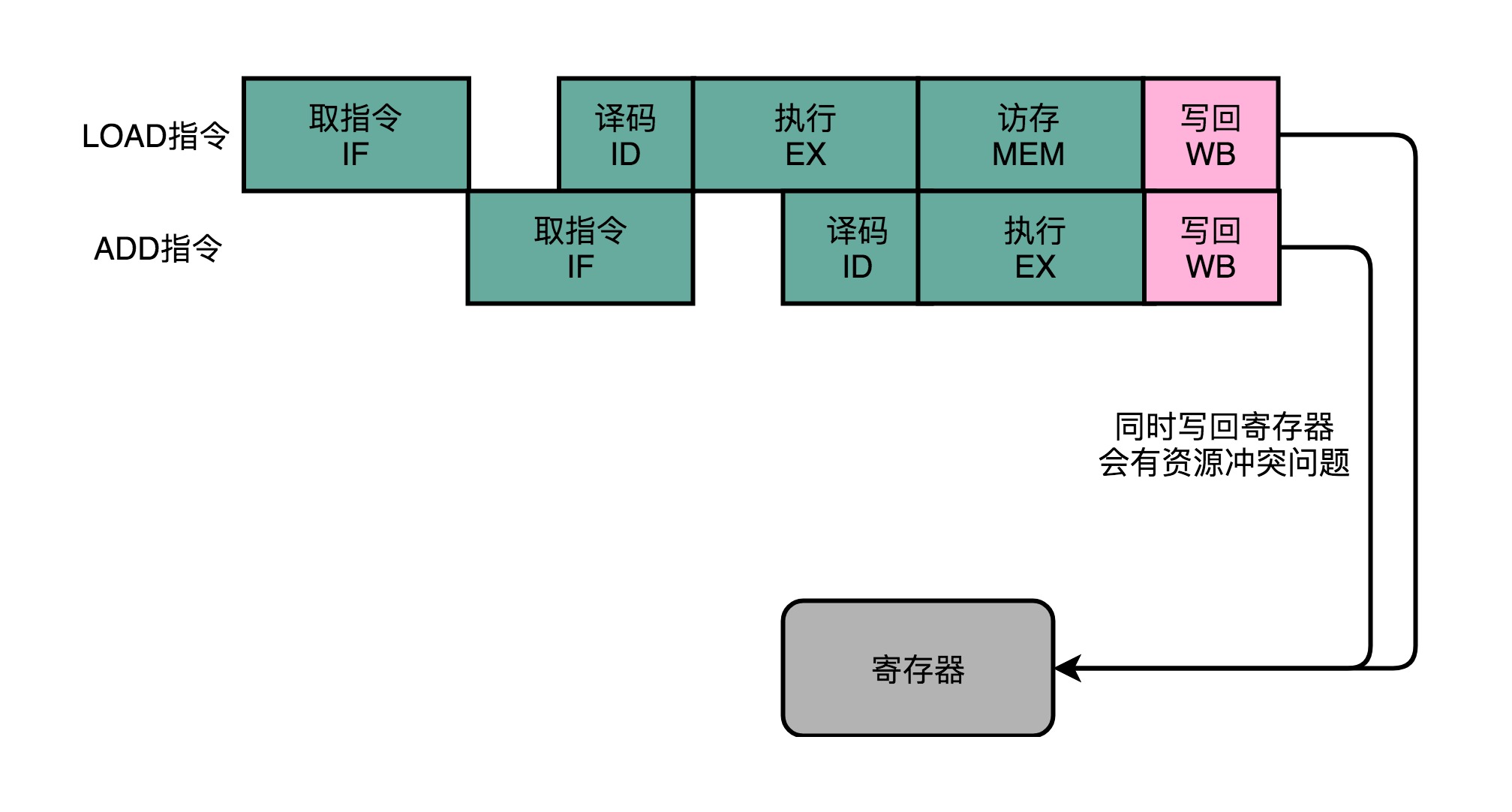
- 有些指令没有对应的流水线阶段,但不能跳过对应的阶段直接执行下一阶段
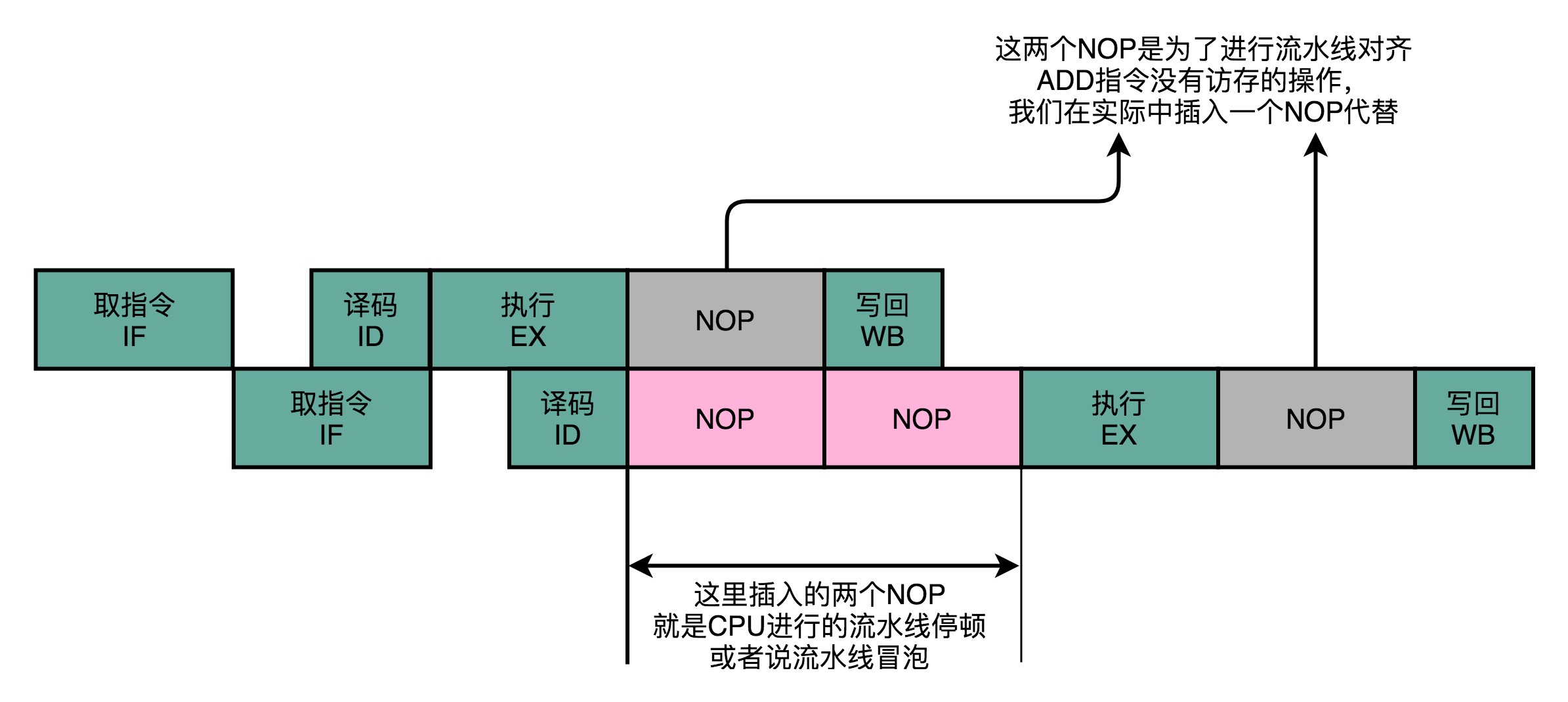
- 如果先后执行一条LOAD指令和一条ADD指令,LOAD指令的WB阶段和ADD指令的WB阶段,在同一个时钟周期发生
- 相当于触发了一个结构冒险事件,产生了资源竞争
- 在实践中,各个指令不需要的阶段,不会直接跳过,而是会运行一次NOP操作
操作数前推
- 通过NOP操作进行对齐,在流水线里,就不会遇到资源竞争产生的结构冒险问题
- NOP操作,即流水线停顿插入的对应操作
- 插入过多的NOP操作,意味着CPU空转增多
1 | // s1 s2 t0都是寄存器 |
- 后一条add指令,依赖寄存器t0的值,而t0里面的值,又来自于前一条add指令的计算结果
- 因此后一条add指令,需要等待前一条add指令的数据写回(WB)阶段完成之后才能执行
- 这是一个数据冒险:数据依赖类型(写 -> 读),上面的方案是通过流水线停顿来解决这个问题
- 要在第二条指令的译码阶段之后,插入对应的NOP指令,直到前一条指令的数据写回完成之后,才能继续执行
- 这虽然解决了数据冒险的问题,但也浪费了两个时钟周期
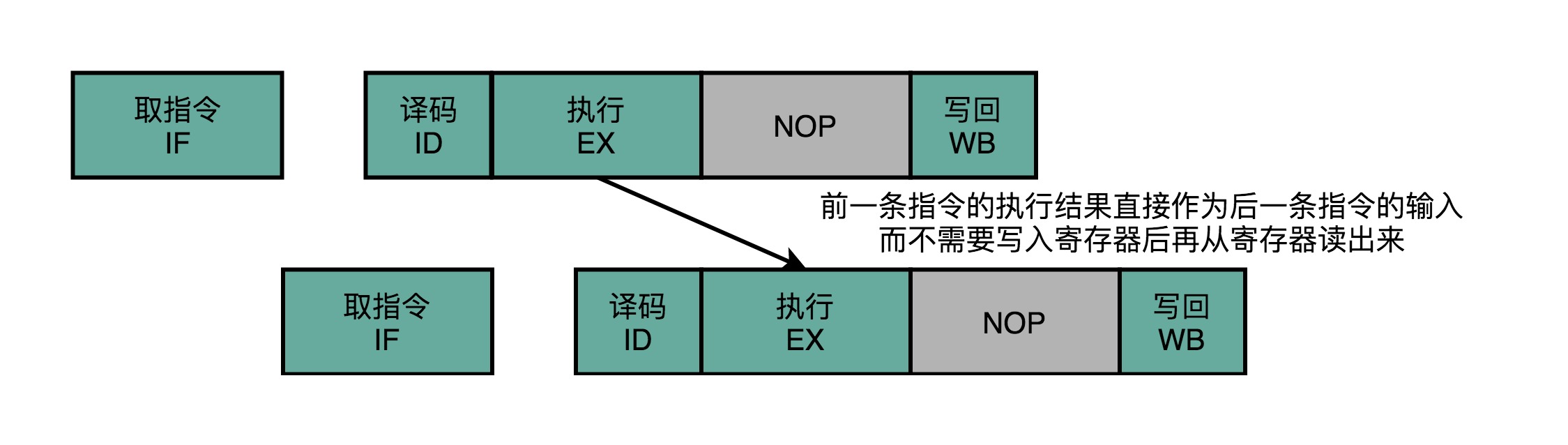
- 第二条指令的执行,未必需要等待第一条指令写回完成才能进行
- 如果能够把第一条指令的执行结果作为输入直接传输到第二条指令的执行阶段
- 那第二条指令就不用再从寄存器里面,把数据再单独读取出来才能执行代码
- 可以在第一条指令的执行(EX)阶段完成之后,直接将结果数据传输到下一条指令的ALU
- 这样,下一条指令不再需要再插入两个NOP阶段,就可以正常走到执行阶段
- 上面的方案就是操作数前推(Operand Forwarding)、操作数旁路(Operand Bypassing)
- Forwarding:逻辑含义,第一条指令的执行结果作为输入直接转发给第二条指令的ALU
- Bypassing:硬件含义,为了实现Forwarding,在CPU的硬件层面,需要单独拉出一根信号传输的线路
- 使得ALU的计算结果能够重新回到ALU的输入
- 越过了写入寄存器,再从寄存器读出来的过程,可以节省两个时钟周期
- 操作数前推的解决方案可以和流水线停顿一起使用
- 虽然可以把操作数转发到下一条指令,但下一条指令仍然需要停顿一个时钟周期
- 先执行一条LOAD指令,再执行ADD指令
- LOAD指令在访存阶段才能把数据读取出来,下一条指令的执行阶段,需要等上一阶段的访存阶段完成之后,才能进行
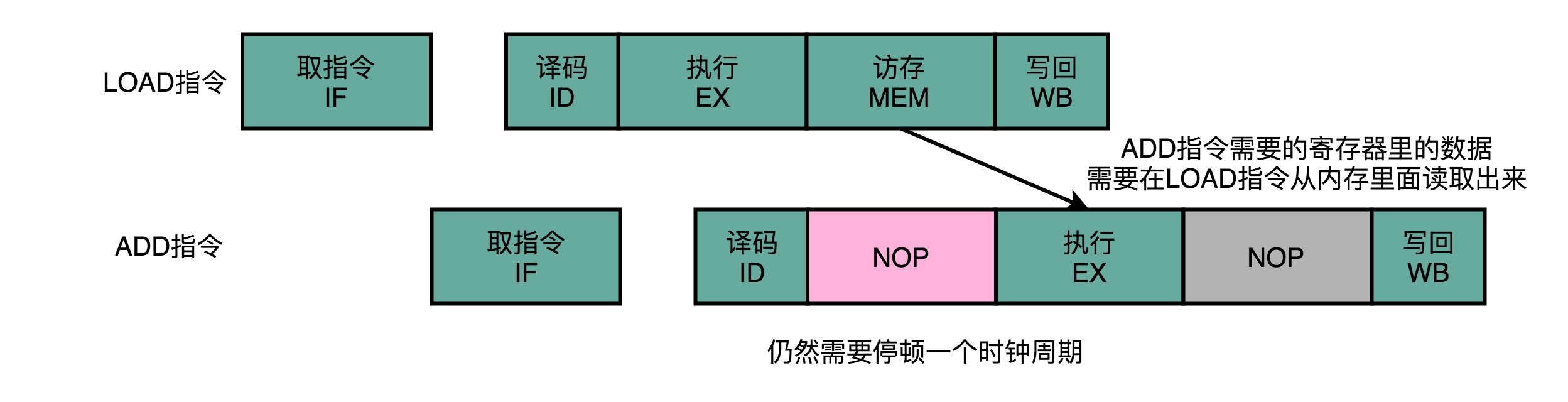
操作数前推并不能减少所有冒泡,只能去掉其中一部分,仍然需要通过插入一些NOP来解决数据冒险问题
乱序执行
- 结构冒险
- 限制来源:在同一时钟周期内,不同的指令的不同流水线阶段,要访问相同的硬件资源
- 解决方案:_增加资源_
- 数据冒险
- 限制来源:数据之间的各种依赖
- 解决方案:_流水线停顿、操作数前推_
- 即便综合运用这三个技术,仍然会遇到不得不停下整个流水线,等待前面的指令完成的情况
填补空闲的NOP
- 无论是流水线停顿,还是操作数前推,只要前面指令的特定阶段还没有执行完成,后面的指令就会被阻塞
- 虽然代码生成的指令是顺序的,如果后面的指令不需要依赖前面指令的执行结果,完全可以不必等待前面的指令执行完成
- 这样的解决方案,在计算机组成里面,被称为乱序执行(Out-of-Order Execution,OoOE)
1 | a = b + c |
实现过程
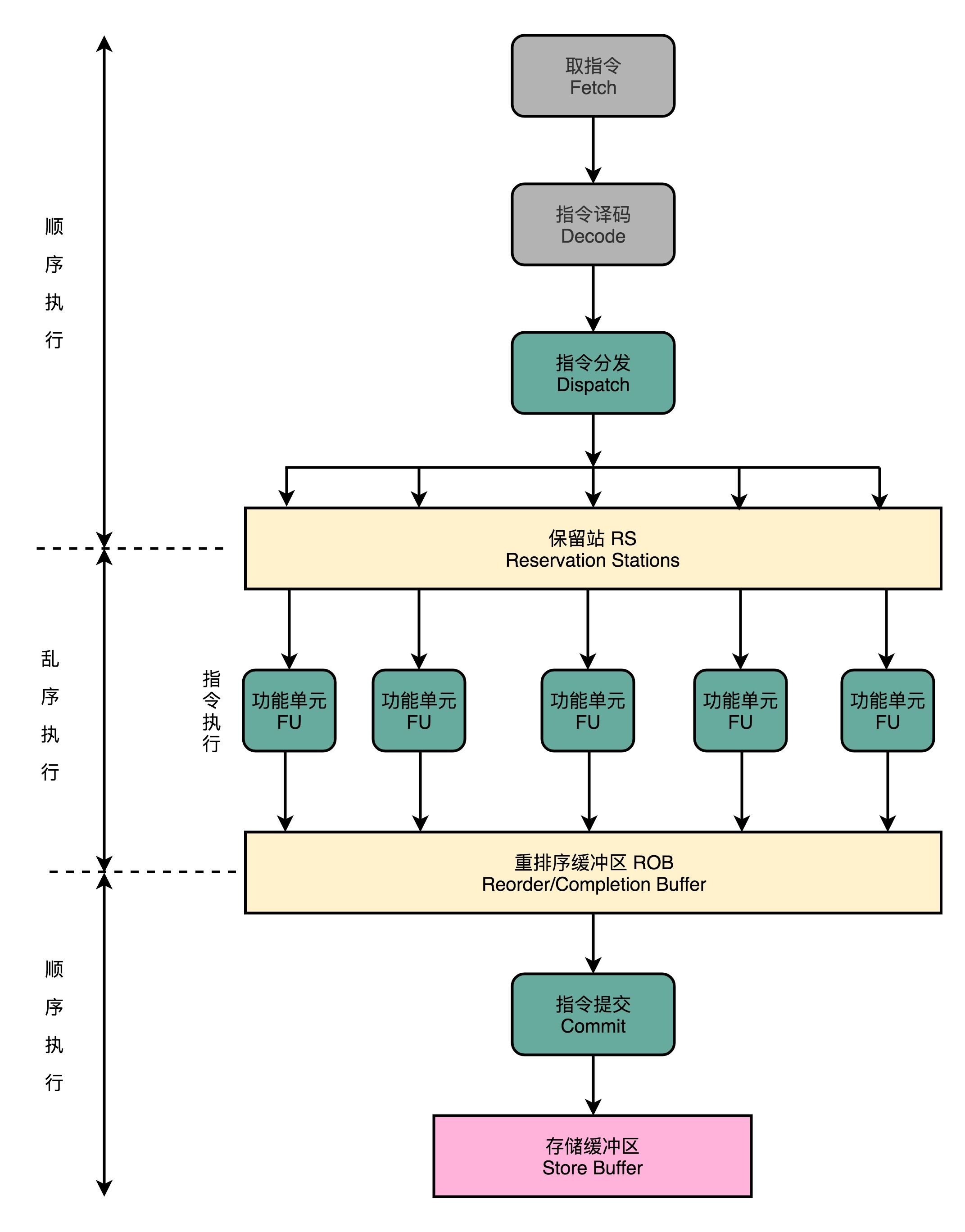
- 取指令和指令译码阶段,乱序执行的CPU和使用流水线架构的CPU是一样的,会一级一级顺序进行
- 指令译码完成后,CPU不会直接进行指令执行,而是进行一次指令分发
- 指令分发:把指令分发到保留站(Reservation Stations,RS)
- 类比:保留站 -> 火车站,指令 -> 火车
- 这些指令不会立即执行,而是等待它们所依赖的数据,传递给它们之后才会执行
- 类比:数据 -> 乘客,火车需要等乘客
- 一旦指令依赖的数据到齐了,指令就可以交到后面的功能单元(Function Unit,FU,本质是ALU)去执行了
- 很多功能单元是可以并行运行的,但不同的功能单元能够支持执行的指令是不相同的
- 指令执行阶段完成后,我们并不能立即把结果写回到寄存器里面,而是把结果先存放到重排序缓冲区(ReOrder Buffer,ROB)
- 在重排序缓冲区里,我们的CPU会按照取指令的顺序,对指令的计算结果重新排序
- 只有排在前面的指令都已经完成了,才会提交指令,完成整个指令的运算结果
- 实际的指令计算结果数据,并不是直接写到内存或者高速缓存,而是先写入存储缓冲区(Store Buffer)
- 最终才会写入内存和高速缓存
- 在乱序执行的情况下,只有CPU内部指令的执行层面,可能是乱序的
- 只要能在指令译码阶段正确地分析出指令之间的数据依赖关系,『乱序』就只会在相互没有影响的指令之间发生
- 相互没有影响 ≈ 不破坏数据依赖
- 即便指令的执行过程是乱序的,在指令的计算结果最终写入到寄存器和内存之前,依然会进行一次排序
- 以确保所有指令在外部看来仍然是有序完成的
回到样例
1 | a = b + c |
- d依赖于a的计算结果,不会在a的计算完成之前执行
x = y * z的指令同样会被分发到保留站,x所依赖的y和z的数据是准备好的,这里的乘法运算不会等待d的计算结果- 如果只有一个FU能够计算乘法,那么这个FU并不会因为d要等待a的计算结果而被限制,会先被拿来计算x
- x计算完成后,d也等来了a的计算结果,此时,唯一的乘法FU会去计算d的结果
- 在重排序缓冲区里,把对应的计算结果的提交顺序,仍然设置为a->d->x,但实际计算完成的顺序是x->a->d
- 整个过程中,计算乘法的FU没有被闲置,意味着CPU的吞吐率最大化
小结
- 整个乱序执行技术,类似于在指令的执行阶段提供了一个线程池,FU就是线程
- 指令不再是顺序执行的,而是根据线程池所拥有的资源,各个任务是否可以进行执行,进行动态调度
- 在执行完成之后,又重新把结果放在一个队列里面,按照指令的分发顺序重新排序
- 即使内部是『乱序』的,但外部看来,仍然是顺序执行的
- 乱序执行,极大地提高了CPU的运行效率
- 核心原因:CPU的运行速度比访问主内存的速度快很多
- 如果采用顺序执行的方式,很多时间会被浪费在前面指令等待获取内存数据
- 为此,CPU不得不加入NOP操作进行空转
- 乱序执行充分利用了较深流水线带来的并发性,可以充分利用CPU的性能
控制冒险
- 在结构冒险和数据冒险中,所有的流水线停顿都要从指令执行(EX)阶段开始
- 流水线的前两个阶段,即取指令(IF)和指令译码(ID),是不需要停顿的
- 基于一个基本假设:所有的指令代码都是顺序加载执行的
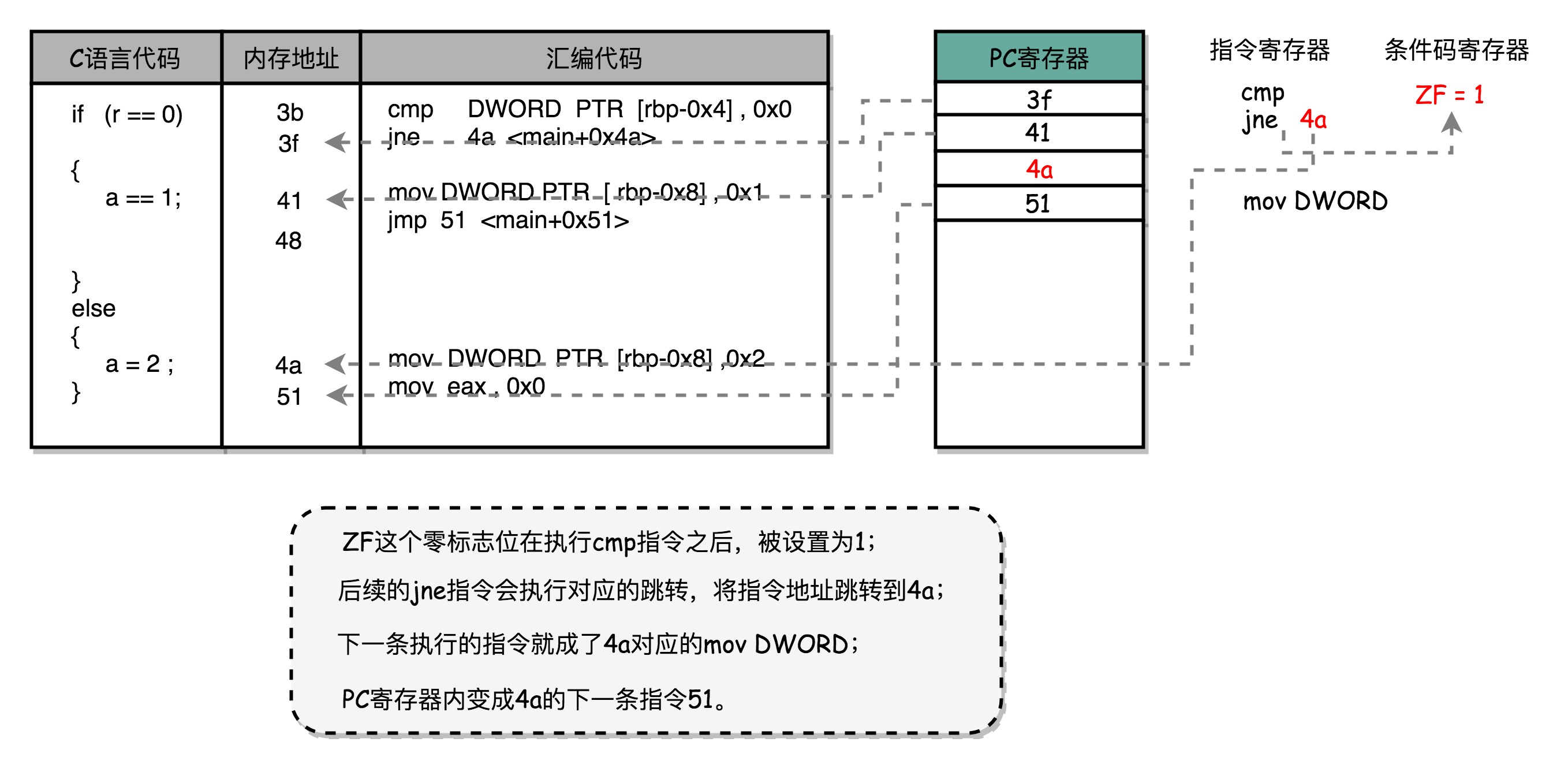
- 不成立的情况:在执行的代码中,遇到if/else条件分支,或者for/while循环
- jne指令发生的时候,CPU可能会跳转去执行其它指令
- jne后的那一条指令是否应该顺序加载执行,在流水线里进行取指令的时候,是无法知道的
- 要等到jne指令执行完成,更新了PC寄存器后,才能知道是否执行下一条指令,还是跳转到另一个内存地址,去取别的指令
- 为了确保能取到正确的指令,不得不进行等待延迟的情况,这就是控制冒险
缩短分支延迟
- 条件跳转指令实际上进行了两种电路操作:条件比较 + 实际跳转
- 条件跳转
- 根据指令的opcode,就能确认对应的条件码寄存器
- 实际跳转
- 把要跳转的地址写入到PC寄存器
- 无论是指令的opcode,还是对应的条件码寄存器,还是跳转的地址,都是在指令译码阶段就能获得的
- 对应的条件码比较电路,只需要简单的逻辑门电路即可,并不需要一个完整而复杂的ALU
- 可以将条件判断、地址跳转,都提前到指令译码阶段进行,而不需要放在指令执行阶段
- 在CPU里面设计对应的旁路,在指令译码阶段,就提供对应的判断比较的电路
- 这种方式,本质上和前面数据冒险的操作数前推的解决方案类似,就是在硬件电路层面,把一些计算结果更早地反馈到流水线中
- 这样反馈会变得更快,后面的指令需要等待的时间就会变短
- 只是改造硬件,并不能彻底解决问题
- 跳转指令的比较结果,仍然要在指令执行完成后才能知道
- 在流水线里,第一条指令进行指令译码的时钟周期里,其实就要取下一条指令了
- 但由于第一条指令还没开始指令执行阶段,此时并不知道比较的结果,自然也就无法准确知道要取哪一条指令了
分支预测
静态预测
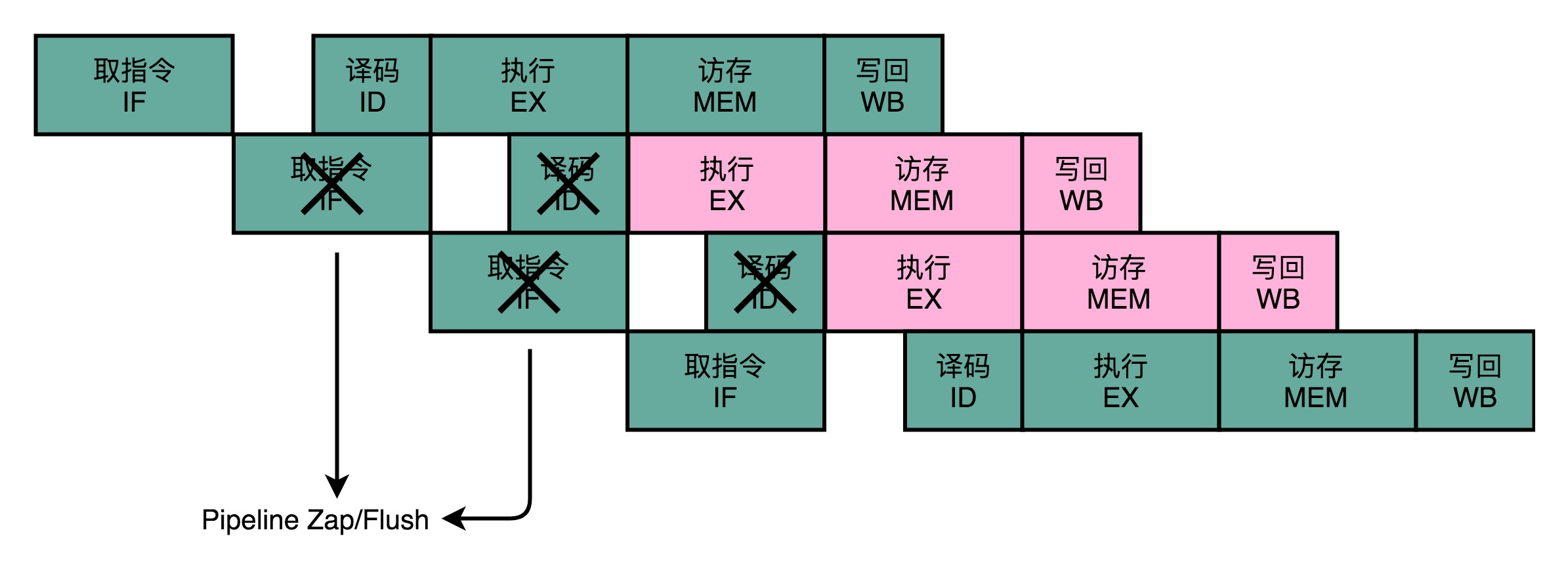
- CPU预测:条件跳转一定不发生
- 如果预测成功,可以节省本来需要停顿下来等待的时间
- 如果预测失败,需要丢弃后面已经取出指令且已经执行的部分
- 这个丢弃的操作,在流水线里面叫作Zap或者Flush
- CPU不仅要执行后面的指令,对于已经在流水线里面执行到一半的指令,还需要做对应的清除操作
- 例如清空已经使用的寄存器里面的数据,而这些清除操作,有一定的开销
动态预测
- 一级分支预测(One Level Branch Prediction)、1比特饱和计数(1-bit saturating counter)
- 用1Bit,记录当前分支的比较情况,直接用当前分支的比较情况来预测下一次分支的比较情况
- 状态机(State Machine)
- 如果状态机总共有4个状态,需要2个比特来记录对应的状态,这样的策略叫作2比特饱和计数或者双模态预测器
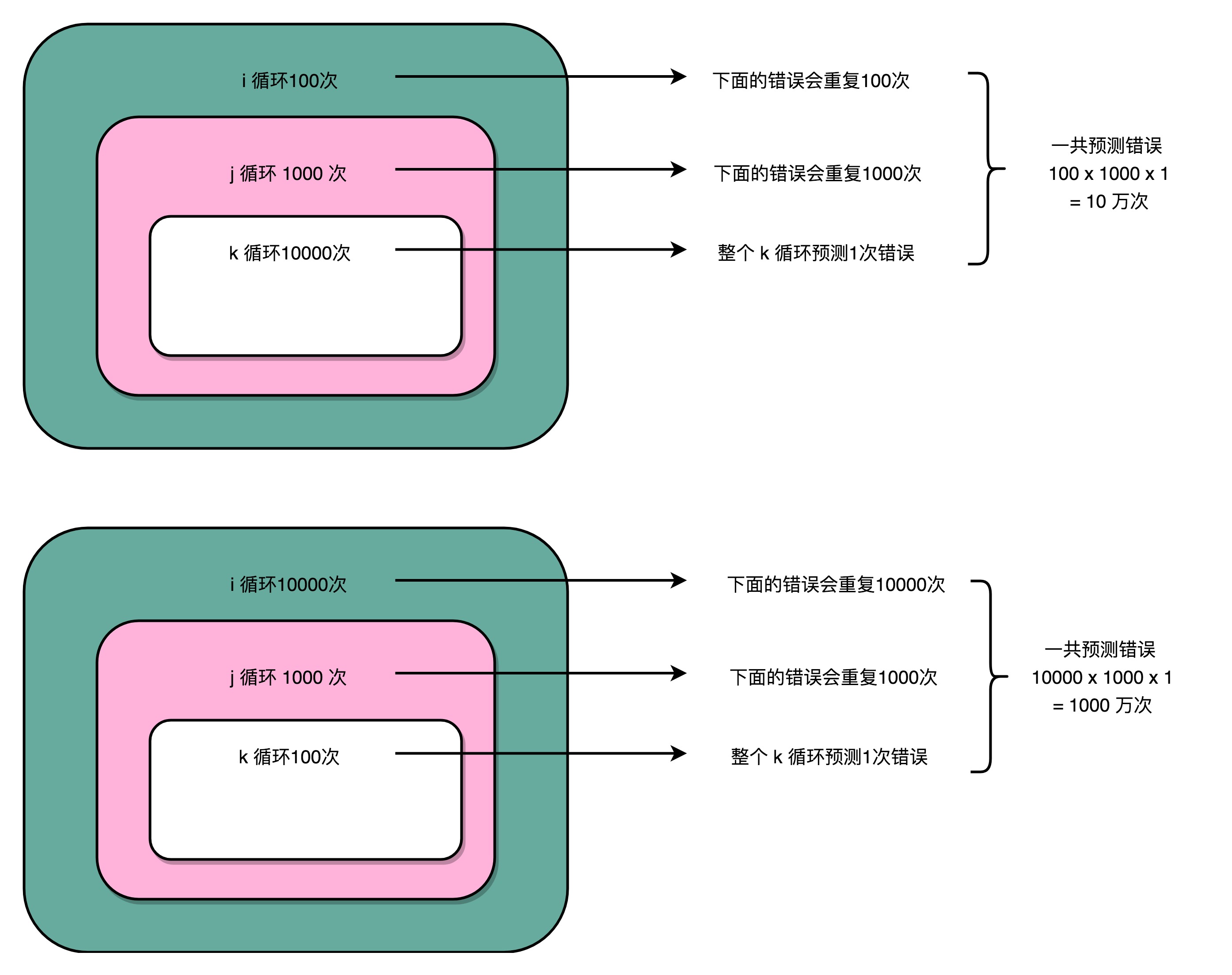
循环嵌套
1 | public class BranchPrediction { |
1 | Time spent is 4 |
- 循环其实也是利用cmp和jle指令来实现的
- 每一次循环都有一个cmp和jle指令
- 每一个jle都意味着要比较条件码寄存器的状态,来决定是顺序执行代码,还是要跳转到另外的地址
- 每一次循环发生的时候,都会有一次『分支』
- 分支预测策略最简单的方式:假设分支不发生
- 对应循环,就是循环始终进行下去
- 上面第一段代码分支预测错误的情况比较少
- 更多的计算机指令,在流水线里顺序运行下去了,而不是把运行到一半的指令丢弃掉,再去重新加载新的指令执行
参考资料
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.
Related Articles
2020-02-03
计算机组成 -- DMA
背景 无论IO速度如何提升,比起CPU,还是太慢,SSD的IOPS可以达到2W,但CPU的主频有2GHz 对于IO操作,都是由CPU发出对应的指令,然后等待IO设备完成操作后返回,CPU有大量的时间都是在等待IO设备完成操作 在很多时候,CPU的等待是没有太多的实际意义的 对于IO设备的大量操作,其实都只是把内存里面的数据,传输到IO设备而已,此时CPU只是在傻等 当传输的数据量比较大的时候,如大文件复制,如果所有数据都要经过CPU,实在有点太浪费时间 因此发明了DMA技术,即直接内存访问(Direct Memory Access),来减少CPU等待的时间 协处理器 本质上,DMA技术就是在主板上一块独立的芯片 在进行内存和IO设备的数据传输的时候,不再通过CPU来传输数据 而直接通过DMA控制器(DMA Controller,DMAC),其实是一个协处理器(Co-Processor) DMAC最有价值的地方:当要传输的数据特别大,速度特别快,或者传输的数据特别小、速度特别慢的时候 用千兆网卡或者硬盘传输大量数据的时候,如果都用CPU来搬运的话,肯定忙不过来,可以选择DMAC 当数据传...

2020-01-06
计算机组成 -- goto
CPU执行指令 CPU是由一堆寄存器组成的,而寄存器是由多个触发器(Flip-Flop)或者锁存器(Latches)组成的简单电路 触发器和锁存器是两种不同原理的数字电路组成的逻辑门 N个触发器或者锁存器,就可以组成一个N位的寄存器,能保存N位的数据,64位的Intel服务器,寄存器就是64位的 寄存器分类 PC寄存器(Program Counter Register),也称为指令地址寄存器(Instruction Address Register) 用来存放下一条需要执行的计算机指令的内存地址 指令寄存器(Instruction Register) 用来存放当前正在执行的指令 条件码寄存器(Status Register) 用里面的一个个标志位(Flag),存放CPU进行算术或者逻辑计算的结果 其它 整数寄存器、浮点数寄存器、向量寄存器、地址寄存器、通用寄存器 程序执行 CPU会根据PC寄存器里面的地址,从内存里把需要执行的指令读取到指令寄存器里面执行 然后根据指令长度自增,开始顺序读取下一条指令,一个程序的指令,在内存里面是连续保存的,也会一条条顺序加载 特殊指令,如J类指令...

2020-01-01
计算机组成 -- First Draft
从输入设备读取输入信息,通过运算器和控制器来执行存储在存储器里的程序,最终把结果输出到输出设备中 参考资料深入浅出计算机组成原理

2020-01-31
计算机组成 -- IO_WAIT
IO性能 硬盘厂商的性能报告:响应时间(Response Time)、数据传输率(Data Transfer Rate) HDD硬盘一般用的是SATA 3.0的接口;SSD硬盘通常会用两种接口,一部分用SATA 3.0接口,另一部分用PCI Express接口 数据传输率 SATA 3.0接口的带宽是6Gb/s ≈ 768MB/s 日常用的HDD硬盘的数据传输率,一般在200MB/s SATA 3.0接口的SSD的数据传输率差不多是500MB/s PCI Express接口的SSD,读取时的数据传输率能到2GB/s,写入时的数据传输率也能有1.2GB/s,大致是HDD的10倍 响应时间 程序发起一个硬盘的读取或写入请求,直到请求返回的时间 SSD的响应时间大致在几十微秒这个级别,HDD的响应时间大致在十几毫秒这个级别,相差几十倍到几百倍 IOPS 每秒读写的次数,相对于响应时间,更关注IOPS这个性能指标 在顺序读写和随机读写的情况下,硬盘的性能是完全不同的 IOPS和DTR才是IO性能的核心指标 在实际的应用开发当中,对于数据...

2020-02-01
计算机组成 -- HDD
物理构造一块机械硬盘由盘面、磁头、悬臂三个部件组成 盘面 盘面(Disk Platter)是我们实际存储数据的盘片 盘面本身通常是用铝、玻璃或者陶瓷这样的材质去做成光滑盘片,然后在盘面上有一层磁性的涂层,数据就存储在磁性的涂层上 盘面中间有一个受电机控制的转轴(控制盘面去旋转),转速:RPM(Rotations Per Minute) 磁头 通过磁头(Drive Head),从盘面上读取数据,然后再通过电路信号传输给控制电路和接口,再到总线上 通常,一个盘面上会有两个磁头,分别是盘面的正反面,盘面在正反面都有对应的磁性涂层来存储数据 一块硬盘不会只有一个盘面,而且上下堆叠了很多个盘面,各个盘面之间是平行的,每个盘面的正反两面都有对应的磁头 悬臂 悬臂(Actutor Arm)链接在磁头上,并且在一定范围内去把磁头定位到盘面的某个特定磁道(Track)上 一个盘面通常是圆形的,由很多同心圆组成,每个同心圆都是一个磁道,每个磁道都有编号 随机读写 一个磁道,会分成多个扇区(Sector),上下平行的盘面的相同扇区,组成一个柱面(Cylinder) 数据读取的步骤 把盘面旋转到某个位置,在这个位...
2020-02-05
计算机组成 -- Disruptor
缓存行填充缓存行大小1234567$ sysctl -a | grep -E 'cacheline|cachesize'hw.cachesize: 17179869184 32768 262144 6291456 0 0 0 0 0 0hw.cachelinesize: 64hw.l1icachesize: 32768hw.l1dcachesize: 32768hw.l2cachesize: 262144hw.l3cachesize: 6291456 RingBufferPad1234abstract class RingBufferPad{ protected long p1, p2, p3, p4, p5, p6, p7;} 变量p1~p7本身没有实际意义,只能用于缓存行填充,为了尽可能地用上CPU Cache 访问CPU里的L1 Cache或者L2 Cache,访问延时是内存的1/15乃至1/100(内存的访问速度,是远远慢于CPU Cache的) 因此,为了追求极限性能,需要尽可能地从CPU Cache里面读取数据 C...